 |
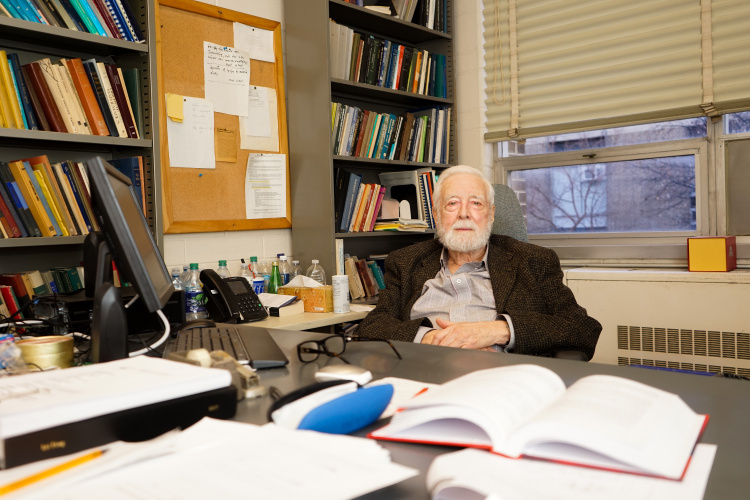
(Walter Murray Wonham)
(1934 - 14.05.2023)
Википедия: Уолтер Маррей Уонхэм (1934, Монреаль, Квебек - 14 мая 2023, Торонто) - канадский теоретик и инженер систем управления машиностроения.
Уонхэм получил степень бакалавра в 1956 году в качестве инженера - физика в Университете Макгилла. В 1961 году получил докторскую степень в теории управления в Университете Кембриджа. В 1960-х он работал в лаборатории контроля и информационных систем в Университете Пердью, в Исследовательском центре Мартина Мариетта, на факультете прикладной математики в Университете Брауна и Управления по теории управления и применению Electronics Research Center НАСА. С 1970 был в группе теории управления (Control Theory) на факультете электротехники в Университете Торонто, где и стал профессором. Он также работал по приглашению профессором в Массачусетском технологическом институте, в Университете Вашингтона, Университете Бремена, математическом Институте Академии Синика в Пекине, Индийском технологическом институте в Канпуре и Федеральном университете де-Санта-Катарина (Флорианополис).
Его научные интересы лежали в области стохастического управления и фильтрации, геометрической теории многофакторного контроля, а в последнее время в области дискретных систем событий с точки зрения формальной логики и языка.
Маррей Уонхэм - автор и соавтор около семидесяти пяти научно-исследовательских работ, а также книги Linear Multivariable Control: A Geometric Approach (есть русский перевод Линейные многомерные системы управления: Геометр. подход / У. Мюррей Уонэм; Перев. с английского Э.Л. Наппельбаума. - М.: Наука, 1980. - 375 с.).
Профессор Уонхэм является членом Королевского общества Канады, членом IEEE.
В период с 1992 по 1996 годы занимал пост декана инженерии и прикладных наук в Университете Торонто.
Скончался 14 мая 2023 года в Торонто.
:
Вадим Ершов...
derevyaha, fire_varan
СПИСОК НЕКОТОРЫХ ОЦИФРОВАННЫХ ИЗДАНИЙ:
... |
 |